Capítulo 3
Fuerzas externas e internas
Fuerzas externas : Representan la acción que ejercen otros cuerpos sobre el cuerpo rígido. Son las causantes de que el cuerpo se mueva o aseguran que se mantenga en reposo. Las fuerzas externas que actúan sobre un cuerpo rígido, puede ocasionar un movimiento de traslación y rotación.
Fuerzas internas : Son aquellas que mantienen unidas las partículas que conforman en cuerpo rígido.
Fuerzas equivalentes
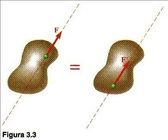
Se dice que dos fuerzas son equivalentes, cuando ambas fuerzas tienen la misma magnitud y dirección , aunque estén actuando en un punto distinto sobre el cuerpo rígido, simepre y cuando las dos fuerzas, tengan la misma linea de acción .
Producto Vectorial de dos vectores
Se representa por la expresión matemática V = P X Q . También lo podemos definir como V= PQsenO
Producto Vectorial expresado en términos de componentes rectangulares
Se calculara el producto vectorial, de cualquier par de los vectores unitarios i,j,k.
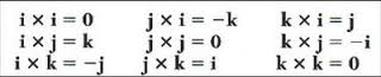
Las componentes rectangulares del producto vectorial están dadas por :
V = (PyQz - PzQy) i + (PzQx - PxQz) j + (PxQy - PyQx) k
Momento de una fuerza con respecto a un punto
El momento de F con respecto a un punto O, se define como el producto vectorial de r y F
Mo=r x F
Conociendo el el angulo O, entre las lineas de acción del vector de posición r y la fuerza F, podemos calcular la magnitud del momento de F con respecto al punto O.
Mo=rFsinO=Fd
Donde d, representa la distancia perpendicular desde O, hasta la linea de acción de F . El momento esta expresado en el sistema internacional en (N*m), y en el sistema de Estados Unidos en (lb*in).
Para fuerzas equivalentes, que ademas tienen momentos iguales con respecto aun punto O, se cumple que F=F" y Mo=M"o .
Teorema de Varignon
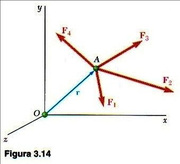
La propiedad distributiva de los productos vectoriales se puede emplear para determinar el momento de la resultante de varias fuerzas concurrentes. Si las fuerzas F1, F2,... se aplican en el mismo punto A y si representa por r al vector de posición A, a partir de la ecuación "P x (Q1 + Q2) = P x Q1 + P x Q2", se puede concluir que:
r = x (F1 + F2 + ...) = r x F1 + F2 + ...
Componentes rectangulares del momento de una fuerza
Si descomponemos el vector de fuerza y el vector de posición, en sus componentes x,y y z obtendremos:
r = xi + yj + zk
F = Fxi + Fyj + Fzk
Donde las componentes escalares Mx, My y Mz están definidas por las relaciones:
Mx = yFz - zFy
My = zFx - xFz
Mz = xFy - yFx
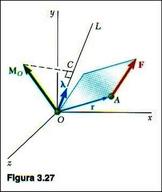
Momento de una fuerza con respecto a un eje
Considerando la fuerza F que actúa sobre un cuerpo rígido y el momento Mo de dicha fuerza con respecto a O . Sea OL un eje a través de O; el momento MOL de F con respecto a OL se define como la proyección OC del momento Mo sobre el eje OL. Representando el vector unitario a lo largo de OL como λ, se tiene:
MOL = λ . MO = λ . (r x F)
Momento de un par
Se dice que dos fuerzas F y -F que tienen la misma magnitud, lineas de acción paralelas y sentidos opuestos forman un par.
La suma de momentos de las dos fuerzas con respecto a un punto es: M = r X F
La magnitud del momento, esta dada por : M =rFsen O= Fd

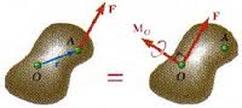
Sistema fuerza-par
Cualquier fuerza F que actué en un punto A , puede reemplazarse por un sistema fuerza-par en un punto arbitrario O el cual consta de la fuerza F aplicada en O y un par de momento Mo, igual al momento de la Fuerza F en su posición original con respecto a O . La fuerza y el vector de par Mo siempre son perpendiculares.
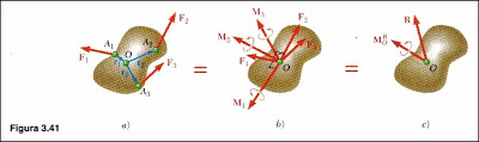
Reducción de un sistema de fuerzas a un sistema de fuerza par
Cualquier sistema de fuerzas puede ser reducido a un sistema fuerza-par en un punto dado O,reemplazando primero cada una de las fuerzas del sistema por un sistema equivalente fuerza par en O, para después sumar todas las fuerzas y todos los pares determinados de esta forma con el fin e obtener a la fuerza resultante R y al vector de par resultante Mo. La resultante y el par no son perpendiculares entre si.